
Autonomous systems
systems
that explain
themselves
Sybrotix transforms complex vehicle data into clear, practical insight — helping engineering and operations teams detect abnormal behaviour, understand what caused it, and make faster, better-informed decisions across air, ground, and underwater systems.
What Sybrotix Does
From raw data to a clear decision
Modern autonomous systems generate enormous volumes of operational data. Sybrotix turns it into understanding your team can act on.
 01
01Detect the Unknown
Surface abnormal and previously unseen behaviour automatically across large volumes of operational data — including issues no rule was written to catch.
 02
02Understand the Cause
Trace what may have contributed to an issue, not just that it happened — connecting signals across the system to point toward likely root cause.
 03
03Evidence & Confidence
Every finding comes with the supporting evidence behind it and a clear measure of confidence, so engineers can verify, not just trust.
 04
04Assess Operational Risk
Understand the potential operational impact of an issue and how it may affect the wider behaviour and safety of your fleet.
 05
05AI-Assisted Investigation
Investigate system behaviour conversationally through an AI-assisted interface — ask questions in plain language and follow the evidence.
 06
06Structured Reports
Turn an investigation into a clear, structured engineering report — ready to review, share with stakeholders, and act on.
See it in action
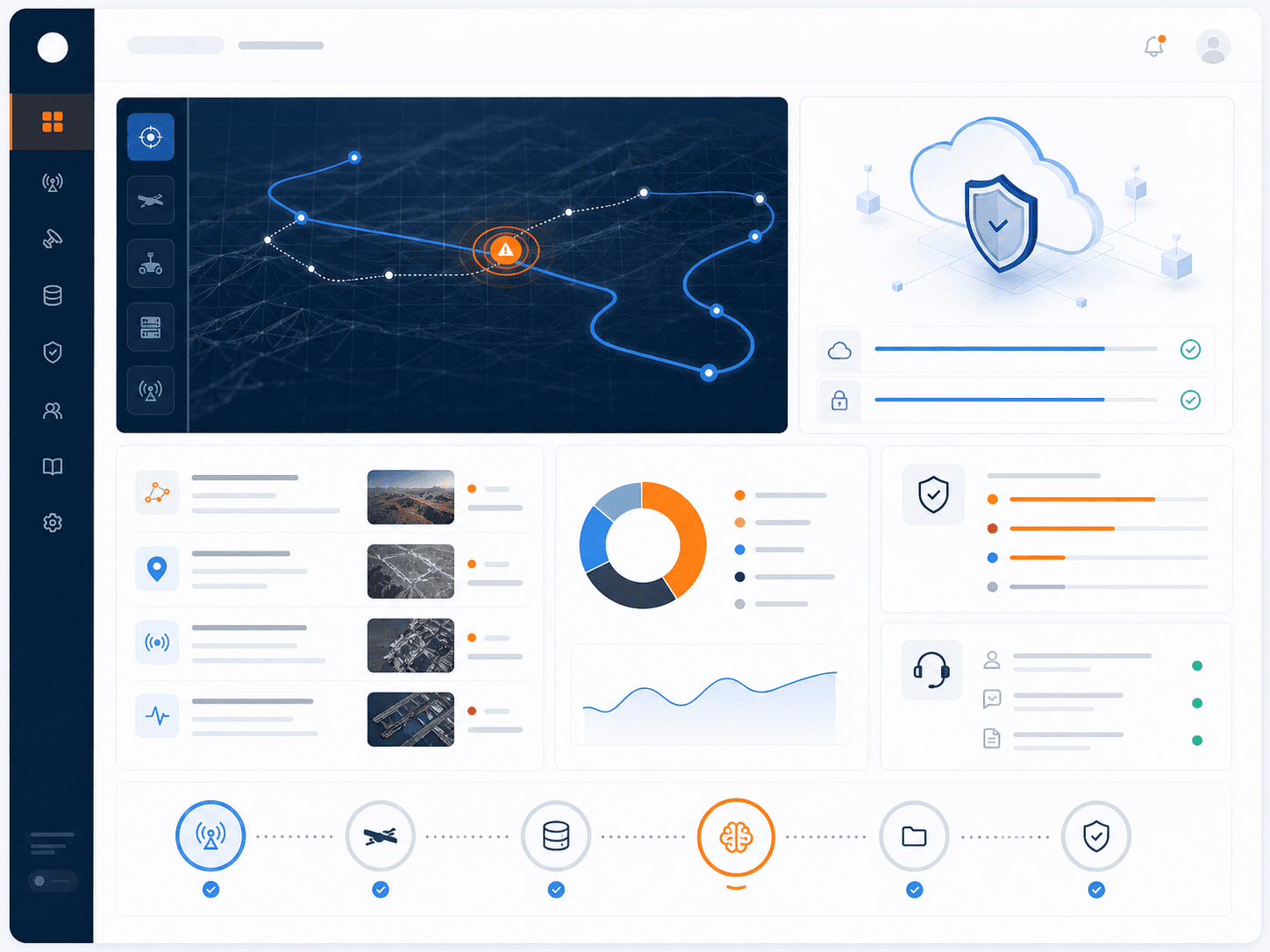
Abnormal behaviour detection, contributing-factor analysis, evidence and confidence, and AI-assisted investigation — all in one interface built for engineering and operations teams.
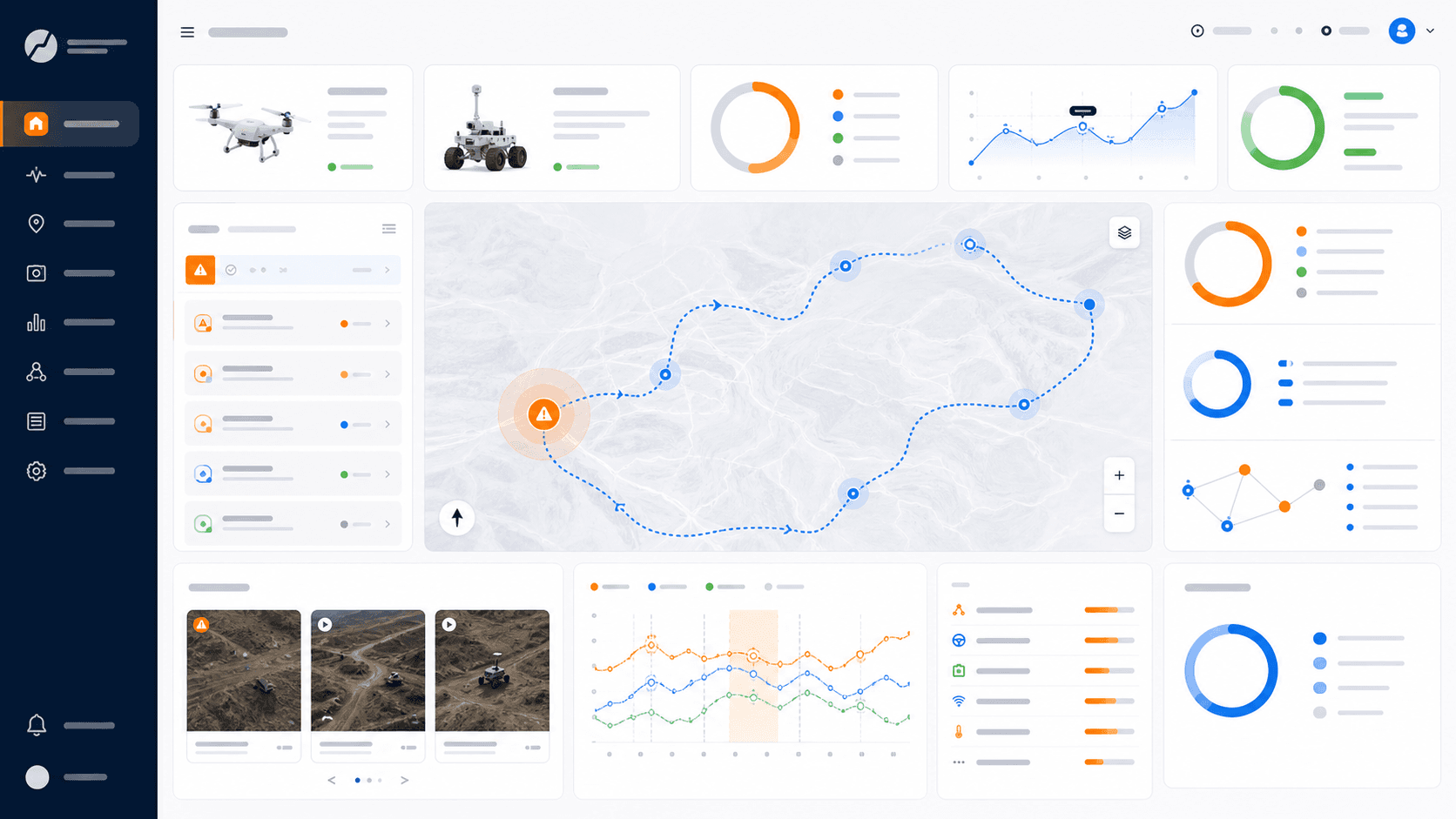
Abnormal Behaviour
DETECTED
Including previously unseen events
Likely Root Cause
Sensor Fusion
Contributing factors traced across signals
Confidence
86%
Evidence attached to every finding
Operational Risk
Elevated
Potential fleet-wide impact assessed
For engineering and operations teams across every autonomous domain
AI-ASSISTED INVESTIGATION
Ask your autonomous system what happened
When a vehicle behaves in a way no one expected, teams shouldn't have to scrub through raw logs for hours. Sybrotix lets you investigate behaviour in plain language — surfacing likely contributing factors, the evidence behind them, and how confident the system is.
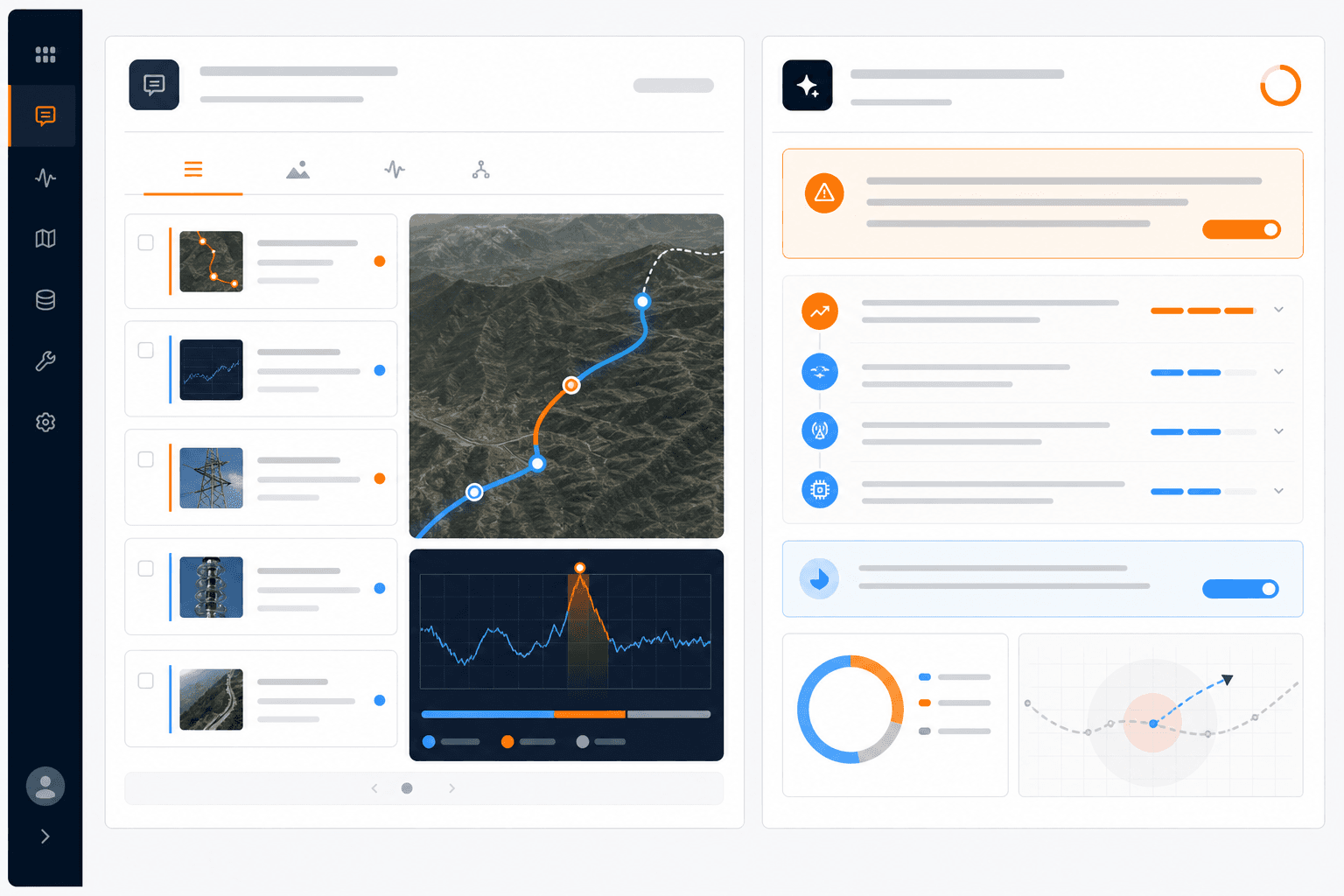
What caused the altitude deviation at 14:32?
Supporting Evidence
- Altitude estimate diverged from barometric reference
- IMU / GPS fusion residual spiked 1.8s prior
- Wind estimate exceeded modelled envelope
- Estimator correction applied with 0.4s latency
Sybrotix links the deviation to a likely sensor fusion mismatch preceded by an unmodelled wind gust, with secondary contribution from delayed estimator correction.
Supporting evidence and confidence are shown for each contributing factor so engineers can verify the reasoning.
Every finding is shown with its supporting evidence and confidence, so engineers can verify the reasoning — not just trust it.
See Sybrotix on your own data
Request a demo or start an evaluation discussion.
HOW IT WORKS
From complex data to clearer understanding
Ingest
Connect operational logs and telemetry from any autonomous platform — air, ground, or underwater.
Detect
Sybrotix surfaces abnormal and previously unseen behaviour automatically, even without predefined rules.
Explain
Trace likely contributing factors, review the supporting evidence, and assess potential operational risk.
Report
Investigate further through an AI-assisted interface and generate structured engineering reports.
ONE PLATFORM, EVERY DOMAIN
Built for autonomous systems everywhere
Drones, eVTOL aircraft, autonomous vehicles, industrial machines, and marine robotics — wherever complex behaviour needs to be understood.
Drones & UAS
Investigate flight anomalies, navigation deviation, and unexpected behaviour across single aircraft or entire UAS fleets.
Learn more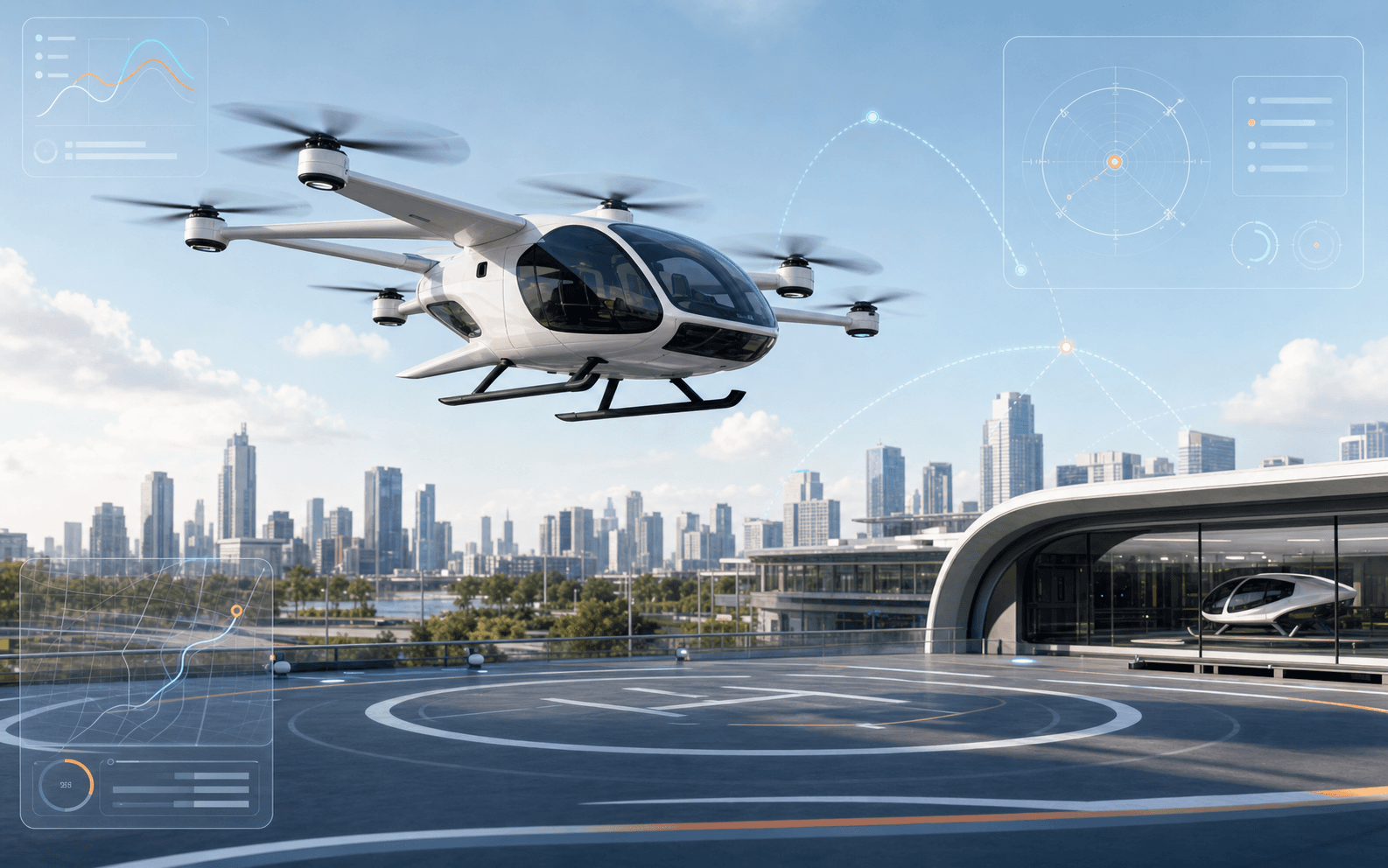
eVTOL Aircraft
Bring engineering-grade explainability to flight testing and operations for next-generation electric vertical-takeoff aircraft.
Learn more
Autonomous Vehicles
Understand disengagements, edge-case behaviour, and abnormal events from ground autonomous vehicle data at scale.
Learn more
Industrial Machines & Robots
Explain abnormal behaviour in autonomous industrial machines and mobile robots before it becomes downtime.
Learn more
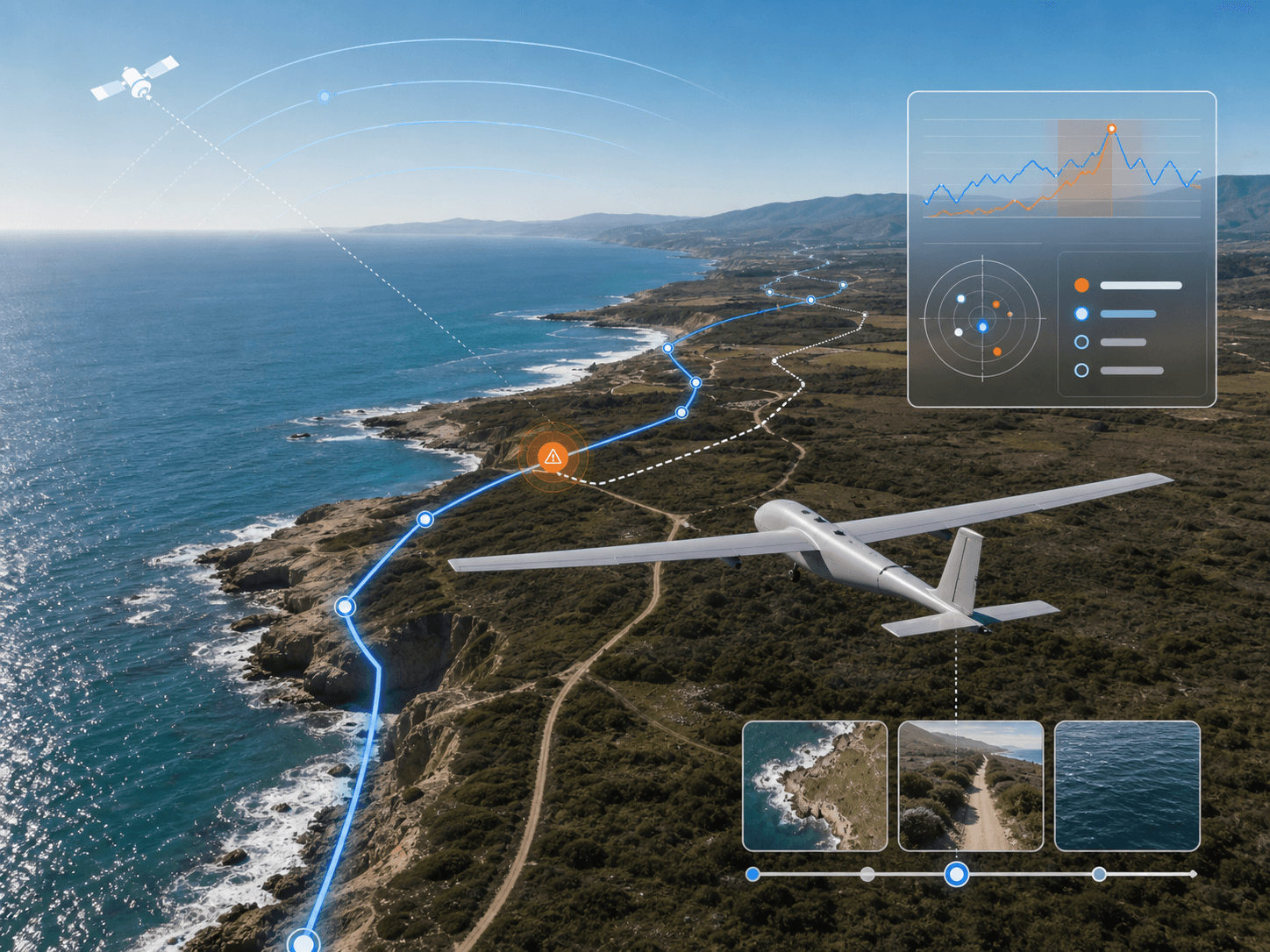
Marine & Underwater Robotics
Investigate behaviour of AUVs, ROVs, and surface vessels operating in environments where data is the only witness.
Learn more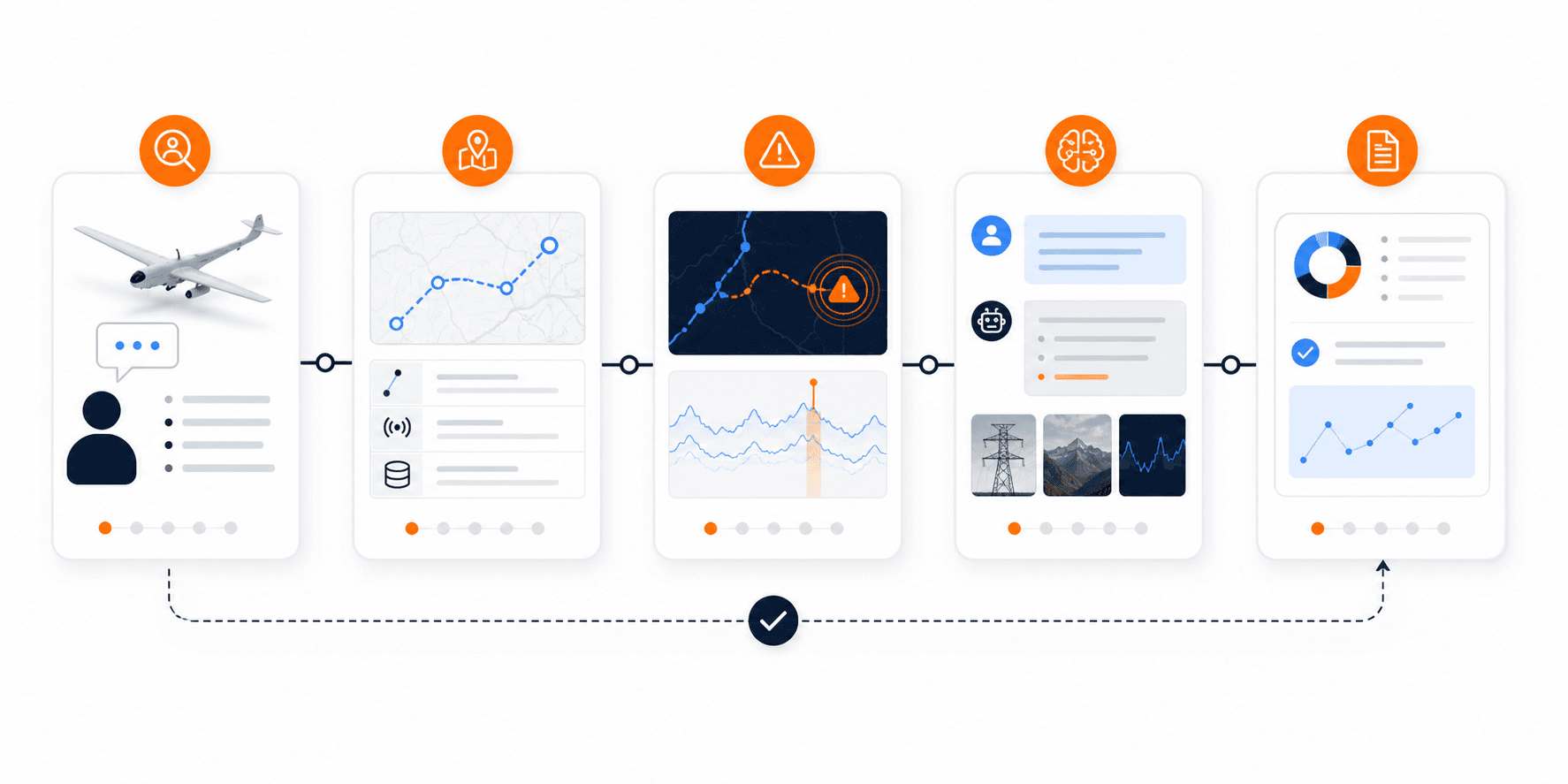
Research & Field Testing
Move from raw logs to clear evidence during trials and validation campaigns, with structured reports for every run.
Learn moreSUPPORTED DOMAINS
Built for autonomous systems across every domain
Sybrotix is domain-agnostic by design. The same intelligence layer turns complex operational data into clear understanding — whether your platform operates in the air, on the ground, or beneath the surface.
Air
- Drones & UAS fleets
- eVTOL aircraft
- Fixed-wing & VTOL platforms
Ground
- Autonomous vehicles
- Industrial machines
- Mobile robots & rovers
Underwater
- Marine robotic systems
- AUVs & ROVs
- Autonomous surface vessels
The same intelligence layer applies across domains — Sybrotix learns the normal behaviour of your specific platform and explains where it deviates.
SECURE BY DESIGN
Your data stays under your control
Sybrotix is built for secure deployment. It can run within your own infrastructure, so sensitive operational and engineering data never has to leave your environment.
- Deploy on-premise or in your private cloud
- Operational and engineering data stays under your control
- Works across air, ground, and underwater platforms
- Integrates with your existing logs and telemetry
- AI-assisted investigation, kept inside your boundary
- Structured reports your team owns end to end
Ready to help your systems explain themselves?
See how Sybrotix turns your operational data into clear insight — detecting abnormal behaviour, explaining likely cause with evidence, and generating structured engineering reports.